机器人操作系统ROS电子书籍大全:从入门到精通
ROS(Robot Operating System)虽然名字中带有“操作系统”几个字,但它实际上是一个用于机器人应用开发的中间件集合。其设计目标是提供一套能够简化复杂机器人软件开发的工具和库。ROS最初由斯坦福大学的Wiener Lab开发,后来由Willow Garage公司进一步推动,现在由Open Robotics维护。在ROS系统中,节点(Node)、消息(Message)和服务(Ser

简介:ROS作为机器人技术的开源软件平台,提供了操作系统级功能,并拥有庞大的全球社区。本文推荐的三本电子书籍《ROS_Robot_Programming_CN》、《ROS入门实例(中文版)》和《机器人操作系统(ROS)浅析》分别从理论、实践到分析各个层面,对ROS进行了全面介绍。从基础架构到复杂交互网络的构建,从工具链开发到调试和测试,以及从实例教学到ROS生态系统分析,为不同层次的学习者提供完整的ROS学习路径。无论初学者还是专业人员,这些书籍都将帮助读者深入理解ROS,并提升机器人开发能力。 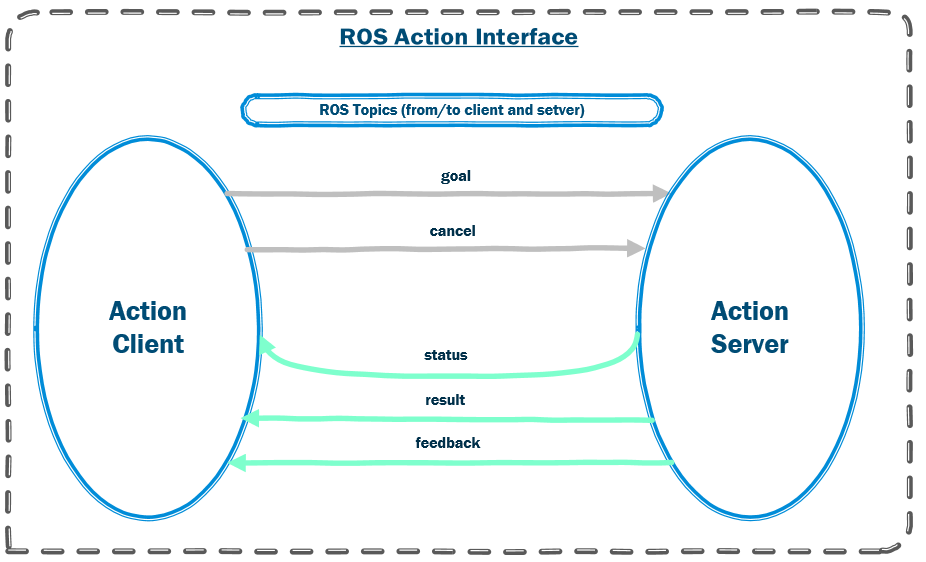
1. ROS基础架构与核心概念
1.1 ROS起源与架构概述
ROS(Robot Operating System)虽然名字中带有“操作系统”几个字,但它实际上是一个用于机器人应用开发的中间件集合。其设计目标是提供一套能够简化复杂机器人软件开发的工具和库。ROS最初由斯坦福大学的Wiener Lab开发,后来由Willow Garage公司进一步推动,现在由Open Robotics维护。
1.2 核心组件功能
ROS的核心组件包括节点(Node)、话题(Topic)、服务(Service)、消息(Message)、参数服务器(Parameter Server)和包(Package)。每个节点相当于一个独立的程序模块,它们通过话题、服务、消息进行通信。参数服务器提供了一个共享的字典,用于存储和检索参数。
1.3 为何选择ROS
ROS之所以受到众多开发者的青睐,是因为它遵循分布式的架构,拥有庞大的社区支持和丰富的第三方包资源。这样的特性使得ROS在处理多传感器、多处理器的复杂系统时,能够提供灵活性与可靠性。对于初学者和专业人士来说,ROS都提供了足够的工具与资源来应对各种开发挑战。
通过上述内容,我们可以感受到ROS强大的功能与灵活性,以及它在机器人领域中所占有的重要地位。接下来,我们会深入到ROS的每个组成部分,了解它们是如何协同工作,共同构建出一个强大的机器人开发平台的。
2. ROS编程基础
2.1 《ROS_Robot_Programming_CN》学习指南
2.1.1 中文编程指南的结构和内容
《ROS_Robot_Programming_CN》是一本专为ROS初学者设计的中文编程指南,其结构和内容旨在帮助读者快速理解ROS的工作原理和编程方法。全书分为基础篇、进阶篇和高级应用篇,每一部分都有其独特的侧重点,共同构成了ROS学习的完整路线图。
基础篇涵盖了ROS的安装、基本概念介绍、工作空间的构建、节点的创建与管理以及话题通信等核心知识。这部分内容对于初学者来说是必要的基石,它奠定了后续学习的基础。
进阶篇深入讲解了ROS中的服务、参数服务器、包管理、调试技巧以及数据存储等方面的知识。通过这部分的学习,读者将能够构建更加复杂的应用程序,并且具备解决实际问题的能力。
高级应用篇则聚焦于移动机器人、传感器数据处理、建图与SLAM等高级话题。这部分内容挑战性更大,但是也是ROS领域最具吸引力的部分之一,为读者展示了ROS在实际应用中的强大能力。
2.1.2 学习资源的获取和利用
为了使读者能够充分利用《ROS_Robot_Programming_CN》的学习资源,指南中提供了丰富的辅助资料和实践案例。首先,书中提供了一个配套的在线资源库,包含了所有的示例代码、实验数据以及一些额外的学习材料。此外,每章结束后都附有练习题和项目建议,供读者巩固和拓展所学知识。
同时,学习指南还提供了一个在线社区链接,读者可以通过这个社区与其他学习者和开发者交流经验、讨论问题,形成一个互助的学习环境。社区中的技术博客、教程视频和开发者的经验分享对于提高学习效率和深化理解有着重要作用。
利用这些资源,读者可以将理论知识和实践操作结合起来,通过不断地编写代码和解决实际问题,进一步提升自己的ROS编程技能。
2.2 ROS核心概念详解
2.2.1 节点、消息、服务的定义和作用
在ROS系统中,节点(Node)、消息(Message)和服务(Service)是三个核心概念,它们共同构成了ROS通信机制的基石。
节点是ROS中的最小执行单元,可以独立运行,并完成特定的功能。例如,在一个机器人系统中,可能会有一个节点负责处理传感器数据,而另一个节点则负责根据处理后的数据来控制机器人的移动。
消息(Message)是节点间传递信息的数据结构。这些消息可以包含任何类型的数据,如传感器读数、控制命令、状态信息等。当一个节点需要将数据发送给其他节点时,它会封装这些数据到一个消息中,然后发布到一个特定的话题上去。
服务(Service)则是节点之间同步通信的一种机制。当一个节点需要请求其他节点执行某个操作并等待结果时,它会调用一个服务。服务的通信过程通常涉及请求(Request)和响应(Response)两个部分,服务提供者执行操作并返回结果。
理解这三个概念对于掌握ROS编程至关重要,因为几乎所有的ROS程序设计都围绕着节点、消息和服务来进行。
2.2.2 参数服务器的角色和使用方法
ROS参数服务器(Parameter Server)是一个存储和管理参数的中心数据库。它可以在程序运行时动态地存储和获取参数,这些参数通常用于控制程序的行为,如配置文件、运行时设置等。参数服务器在多个节点间共享全局参数,对于需要调整参数但又不想重启程序的场景尤其有用。
使用参数服务器通常涉及以下几个步骤:
- 设置参数:启动节点前,可以使用命令行工具
rosparam设置参数,或者在节点启动后通过发布消息的方式设置参数。 - 获取参数:节点可以通过
ros::NodeHandle的param方法来获取存储在参数服务器上的参数值。 - 删除参数:节点可以删除参数服务器上的参数,使用
rosparam delete命令即可。
下面是一个简单的代码示例,展示了如何在ROS节点中设置和获取参数:
#include "ros/ros.h"
int main(int argc, char **argv)
{
ros::init(argc, argv, "param_node");
ros::NodeHandle nh;
// 设置参数
nh.setParam("/param_name", 123);
// 获取参数
int value;
if (nh.getParam("/param_name", value))
{
ROS_INFO("Retrieved parameter: %d", value);
}
else
{
ROS_ERROR("Failed to retrieve parameter");
}
ros::spin();
return 0;
}
在这个例子中,我们首先包含了必要的ROS头文件,初始化了ROS节点,并创建了一个 NodeHandle 实例。然后,我们使用 setParam 方法设置了一个名为 /param_name 的参数,并赋值为123。在设置参数之后,我们尝试用 getParam 方法来获取该参数的值,并通过日志信息打印出来。
ROS参数服务器在实际应用中是非常灵活和强大的工具,它的使用方式和场景有很多,上面只是对其基础功能的一个简单介绍。
以上为《ROS_Robot_Programming_CN》学习指南的结构和内容以及ROS核心概念的详解部分。接下来将进入更加具体的编程实践环节。
3. ROS编程语言的实践应用
编程语言是实现机器人软件系统功能的基石。在ROS(Robot Operating System)中,C++和Python是两种最为常用的编程语言。它们各有优势,被广泛应用于ROS项目的开发中。本章将深入探讨C++和Python在ROS中的应用实践,并分享一些技巧和经验。
3.1 C++在ROS中的应用
C++因其高性能和对系统底层控制的强大能力,在需要执行复杂计算和实时处理的应用中显得尤为重要。在ROS中,C++通常用于开发驱动节点、算法节点和关键性能部分。
3.1.1 C++与ROS的集成方法
集成C++与ROS是通过ROS的构建系统Catkin来实现的。首先,开发者需要创建一个Catkin工作空间,并在其中创建一个包(package),接着添加C++源代码文件及其编译规则。
一个典型的CMakeLists.txt文件,用于定义ROS节点和依赖关系,如下所示:
cmake_minimum_required(VERSION 2.8.3)
project(my_c++_ros_node)
find_package(catkin REQUIRED COMPONENTS
roscpp
std_msgs
)
catkin_package()
include_directories(
${catkin_INCLUDE_DIRS}
)
add_executable(my_c++_node src/my_c++_node.cpp)
target_link_libraries(my_c++_node ${catkin_LIBRARIES})
上述代码块定义了一个名为 my_c++_node 的可执行文件,并将其链接到ROS的C++库。
3.1.2 C++在ROS项目中的实践技巧
在ROS项目中,实践C++的关键点在于有效地利用ROS消息传递机制。开发者需要熟悉如何使用 ros::NodeHandle 以及如何定义和发布消息。下面是一个简单的C++ ROS节点的代码样例:
#include <ros/ros.h>
#include <std_msgs/String.h>
void chatterCallback(const std_msgs::String::ConstPtr& msg)
{
ROS_INFO("I heard: [%s]", msg->data.c_str());
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "listener");
ros::NodeHandle nh;
ros::Subscriber sub = nh.subscribe("chatter", 1000, chatterCallback);
ros::spin();
}
在该例中,定义了一个监听器节点,它订阅了名为 chatter 的话题,并在接收到消息时执行回调函数 chatterCallback 。
3.2 Python在ROS中的应用
Python因其简洁的语法、快速的开发周期和丰富的第三方库而受到许多开发者的青睐。在ROS中,Python广泛应用于快速原型开发、测试以及机器人行为的设计。
3.2.1 Python与ROS的集成方法
与C++类似,Python与ROS的集成也是通过Catkin来完成的。开发者需要确保系统中安装了Python的支持包,如 rospy 。
一个简单的Python脚本节点可能看起来如下:
#!/usr/bin/env python
import rospy
from std_msgs.msg import String
def callback(data):
rospy.loginfo("I heard %s", data.data)
def talker():
pub = rospy.Publisher('chatter', String, queue_size=10)
rospy.Subscriber('chatter', String, callback)
rospy.spin()
if __name__ == '__main__':
rospy.init_node('talker', anonymous=True)
talker()
这个Python脚本定义了一个名为 talker 的节点,它发布消息到 chatter 话题,并订阅相同的对话以接收消息。
3.2.2 Python在ROS项目中的实践技巧
Python在ROS项目中的实践重点在于对ROS消息的处理和对ROS核心功能的调用。在使用Python时,开发者可以利用 rospy 包提供的简单接口。例如,定义一个定时器或在循环中执行特定的任务相对简单:
timer = rospy.Timer(rospy.Duration(2), timer_callback)
def timer_callback(event):
rospy.loginfo("This function is called every 2 seconds")
上述代码演示了如何设置一个定时器,每2秒执行一次 timer_callback 函数。
3.3 选择C++还是Python?
选择C++还是Python取决于多个因素,包括项目的性能要求、开发时间限制和开发者的技能集。在性能敏感型应用中,C++通常是更好的选择,而Python适合需要快速开发和测试的场景。
以下是C++和Python在ROS中使用时的一些优缺点对比:
| 特性 | C++ | Python | |---|---|---| | 性能 | 高性能,尤其在需要实时处理时 | 适合快速开发和原型设计,性能较低 | | 生态系统 | 丰富的库支持,主要集中在系统编程和图形处理 | 大量第三方库支持,适合科学计算和数据分析 | | 开发速度 | 较慢,因为编译过程 | 快速,解释执行 | | 错误处理 | 静态类型检查有助于早期发现错误 | 动态类型可能导致运行时错误 | | 学习曲线 | 较陡峭,语法和性能调优需要深入了解 | 较平缓,适合初学者 | | 跨平台 | 跨平台支持良好 | 跨平台支持良好 |
要选择最适合的语言,开发者需要权衡这些优缺点与项目需求。
3.4 小结
C++和Python都有其在ROS项目中的优势和适用场景。通过合理选择语言并掌握对应的集成方法和实践技巧,开发者能够充分利用ROS强大的生态系统来构建复杂的机器人应用。在下一章节中,我们将探讨ROS构建系统与开发工具的深入知识,以进一步增强ROS项目的开发能力。
4. ROS构建系统与开发工具
4.1 Catkin构建系统深入解析
Catkin是ROS(Robot Operating System)构建系统的最新迭代,它为ROS提供了编译、安装和发布软件包的能力。Catkin基于CMake,提供了许多额外的工具来帮助管理ROS软件包之间的依赖关系,并简化了构建和安装过程。
4.1.1 Catkin系统的工作原理
Catkin的工作原理可以通过理解其工作流程来获得,Catkin构建系统的工作流程可以分为以下几个步骤:
-
软件包源代码准备 :首先需要将源代码准备好,并且组织成ROS软件包的形式。每个软件包通常包括
package.xml和CMakeLists.txt文件。 -
依赖关系解析 :Catkin会读取每个软件包的
package.xml文件,解析出软件包之间的依赖关系,并根据这些依赖关系决定构建顺序。 -
CMake构建过程 :Catkin调用CMake来实际构建软件包。CMake使用
CMakeLists.txt文件中定义的规则生成makefiles。 -
生成和安装 :构建完成后,Catkin会将构建结果安装到指定的文件夹中,通常是
devel或install文件夹。
4.1.2 Catkin工作空间的创建与管理
Catkin工作空间(workspace)是组织ROS软件包的地方。创建和管理Catkin工作空间通常涉及以下步骤:
-
创建工作空间 :
bash mkdir -p ~/catkin_ws/src cd ~/catkin_ws/ catkin_make这段代码创建了一个包含src目录的目录结构,并在其中初始化了一个Catkin工作空间。catkin_make会构建工作空间,生成devel和build目录。 -
设置环境变量 :
bash source devel/setup.bash在每次打开新的终端或者在脚本中使用ROS之前,需要设置环境变量来确保ROS能够正确地找到工作空间。 -
添加软件包 :
bash cd ~/catkin_ws/src git clone <package_repo> cd ~/catkin_ws catkin_make在src目录下可以添加新的软件包。使用git clone来添加需要的ROS软件包,然后再次执行catkin_make以构建工作空间。 -
运行单元测试 :
bash catkin_make run_testsCatkin提供了一个run_tests目标,可以用来运行工作空间中软件包的单元测试。
Catkin工作空间的创建和管理是ROS开发过程中不断重复的任务,开发者需要熟悉这些基本操作。
4.2 ROS开发工具的使用
ROS开发工具是提高开发效率的关键。在本章节中,我们将探讨ROS开发环境的搭建以及如何配置和优化工具链。
4.2.1 ROS开发环境的搭建
搭建ROS开发环境是开始任何ROS项目的首要步骤。以下是搭建ROS开发环境的一般步骤:
-
安装ROS : ROS的安装依赖于操作系统的具体版本。对于Ubuntu系统,可以通过添加官方软件源并安装相应版本的ROS来完成安装。
bash sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654 sudo apt-get update sudo apt-get install ros-<ros_version>-ros-base请将<ros_version>替换为相应版本如noetic或melodic等。 -
安装rosdep :
rosdep是ROS的依赖管理工具,能帮助安装系统依赖以及初始化新软件包。bash sudo apt-get install python-rosdep sudo rosdep init rosdep update - 环境初始化 : 为了使ROS环境变量生效,需要在
.bashrc文件中添加以下内容:bash source /opt/ros/<ros_version>/setup.bash - 获取ROS工具链 : ROS开发需要一些额外的工具,如
roslaunch,rosnode等,这些工具随ROS安装包一起安装。
4.2.2 工具链的配置和优化
配置工具链包括安装IDE(集成开发环境)、调试工具、版本控制系统等。优化工具链意味着设置快捷方式、配置主题和外观、安装插件等,以提高开发效率和舒适度。
-
安装IDE : 为了便于ROS项目的开发,安装一个功能强大的IDE是很有必要的。例如,许多ROS开发者倾向于使用Visual Studio Code (VS Code)。
bash sudo snap install --classic codeVS Code需要安装ROS插件,这可以通过打开VS Code并导航到扩展市场来完成。 -
安装版本控制系统 : Git是版本控制系统的首选。如果系统中尚未安装Git,可以通过以下命令安装:
bash sudo apt-get install git -
配置环境 : 配置环境通常包括设置快捷键、主题、插件等。例如,配置VS Code以自动识别ROS工作区:
json { "ROSWorkspace": "/home/<username>/catkin_ws" }将<username>替换为实际用户名,并在VS Code的设置中引用这个路径。 -
优化构建和调试工具 : 开发者可能需要安装额外的构建和调试工具。例如,GDB和Valgrind可以帮助开发者进行程序的调试和性能分析。
bash sudo apt-get install gdb valgrind
优化工具链是提高开发效率和项目质量的重要环节。持续调整和更新开发工具是保持开发环境最佳状态的关键。
Catkin构建系统和ROS开发工具的熟练使用是高效开发ROS项目的基础。掌握这些工具的使用可以显著提高生产力,并帮助开发者更好地理解ROS项目的构建和维护过程。随着进一步的开发实践,开发者将对这些工具的应用拥有更深刻的认识。
5. ROS高级应用与理论深入
5.1 ROS高级知识点概述
5.1.1 移动机器人导航的ROS实现
在现代机器人领域中,移动机器人的导航是一个关键的应用方向,ROS通过一系列的包和工具提供了一套完整的解决方案。导航栈(Navigation Stack)是ROS中实现机器人自主导航的核心组件,它利用各种传感器数据来引导机器人在复杂环境中进行路径规划、避障和自主定位。
为了实现这一功能,首先需要为机器人搭建一个合适的硬件平台,包括驱动器、传感器、计算单元等。传感器可能包括激光雷达(LIDAR)、立体摄像头、惯性测量单元(IMU)等。接着需要对这些硬件进行适当的配置和集成,以确保它们可以被ROS系统正确识别和使用。
接下来,需要使用ROS提供的 gmapping 、 amcl 等包来对环境进行建图和定位。 gmapping 用于创建未知环境的地图,而 amcl (Adaptive Monte Carlo Localization)则负责在已知地图中确定机器人的位置。
导航栈的配置包括几个关键步骤,如设置成本地图(Costmap),它是一种二维数组,表示机器人在平面内的活动空间,障碍物区域和自由空间都有不同的代价值。此外,需要定义机器人的运动模型、速度限制和加速度限制等参数,这些参数对导航的成功至关重要。
最后,应用诸如 move_base 节点来实际进行路径规划和移动控制。这个节点是导航栈的核心,负责接收导航目标,规划出一条从当前位置到目标位置的路径,并通过发布速度命令来控制机器人的运动。
通过以上步骤,机器人可以实现自主的导航功能,这对于实现服务机器人、巡检机器人等在复杂环境下的自动化运行至关重要。
5.1.2 传感器数据处理的ROS方法
ROS提供了丰富的数据处理工具和算法,以应对机器人系统中常见的传感器数据。在处理传感器数据时,通常需要经历数据采集、数据滤波、特征提取和数据融合等步骤。
以激光雷达数据处理为例,首先需要使用ROS中的 driver 节点来订阅激光雷达的话题(topic),获取原始的点云数据。随后,可以应用 roslaunch 来启动相应的数据处理节点,利用 pcl (Point Cloud Library)对点云数据进行滤波和特征提取,以消除噪声和提取有用的几何特征。
在特征提取之后,通常需要进行数据融合。数据融合可以通过多个传感器的同步输入来提高测量的准确性和鲁棒性。ROS提供了例如 tf (Transformation Framework)这样的工具来帮助同步不同传感器的数据,并通过坐标变换,将所有传感器的数据统一到一个公共的坐标系中。
ROS中的 robot_localization 包可以用来融合不同传感器的数据,包括IMU和轮式里程计数据,以提供更为准确的机器人的位姿估计。这一过程通常涉及到复杂的卡尔曼滤波器或者粒子滤波器的实现。
除了上述的通用数据处理流程,ROS还提供了其他专用的处理工具,如 image_pipeline 用于图像数据的处理, robot_state_publisher 用于机器人状态的发布等。这些工具和包使得ROS在处理各种传感器数据时显得异常灵活和强大。
5.1.3 机器人建图与SLAM技术
机器人建图与同时定位和地图构建(SLAM)技术是机器人导航领域中的核心问题之一。SLAM允许机器人在没有预建地图的情况下探索环境,并同时绘制环境地图和确定自身的位姿。
在ROS中,实现SLAM的方法有多种,其中包括 gmapping 、 ORB-SLAM 、 RTAB-Map 等。 gmapping 使用扩展卡尔曼滤波器(EKF)来估计机器人的位姿,并生成栅格地图。 ORB-SLAM 是一种基于视觉的SLAM系统,它使用特征点进行定位和地图构建。 RTAB-Map 则通过回环检测技术来增强地图的准确性和鲁棒性。
对于SLAM的实现,通常需要一个移动机器人平台,配置有传感器(如激光雷达或摄像头),然后通过ROS节点订阅这些传感器的话题以获取数据。数据处理和SLAM的算法会在后台运行,实时更新机器人的位置和环境地图。
除了这些基础的SLAM包,ROS还提供了一些高级功能,比如 map_server 节点,它允许加载和保存地图,以及 amcl 节点,它用于处理在已知地图上的定位问题。
对于开发人员来说,理解SLAM背后的数学原理和算法是非常重要的。例如,EKF-SLAM和粒子滤波SLAM(FastSLAM)算法在ROS中都有广泛的应用。因此,建议开发者在使用这些工具之前,先对SLAM的原理和算法有所了解。
在实际应用中,根据机器人的应用场景和所用传感器的特性,开发者可能需要对ROS的SLAM工具包进行定制和优化,以达到最佳的性能。这可能涉及到调整算法参数、优化计算流程或者甚至是开发全新的SLAM算法。
综上所述,SLAM技术在ROS中的实现覆盖了从数据采集、处理、定位到地图构建的完整流程。随着技术的不断发展,ROS中的SLAM工具也在持续更新和优化,为机器人导航和自主探索提供了强有力的支撑。
5.2 ROS设计哲学和核心组件
5.2.1 ROS的设计理念和核心组件
ROS(Robot Operating System)并不是一个传统意义上的操作系统,而是一个用于编写机器人软件的框架,它具有许多与传统操作系统相似的功能。ROS的设计理念是建立在模块化、分布式计算和松耦合这三个原则之上的。模块化允许开发者创建可重用的软件模块;分布式计算使得多个计算机节点可以并行工作;而松耦合则意味着节点之间的依赖关系可以尽可能地减少,以提高系统的灵活性和可扩展性。
ROS的核心组件包括节点(Nodes)、话题(Topics)、消息(Messages)、服务(Services)、参数服务器(Parameter Server)和包(Packages)等。节点是运行ROS软件模块的进程;话题是节点之间传递消息的通道;消息是节点间通信的数据结构;服务是节点之间请求/响应模式的通信方式;参数服务器是存储全局参数的存储中心;包是ROS软件的最小组织单元,它包含了代码、库文件、配置文件等。
ROS的这种模块化设计使其成为了一个极为灵活的机器人软件开发平台。开发者可以根据自己的需求定制和组合不同的节点,来构建复杂的机器人系统。ROS的分布式计算能力使得机器人系统中的各个组件可以分布在不同的计算节点上运行,这有助于提升系统的整体性能。
ROS的松耦合设计也体现了其高度的可定制性和可重用性。由于节点之间通过话题和服务等机制进行通信,使得它们可以独立地开发和修改,而不会影响到整个系统的其它部分。这在需要快速迭代和模块替换的机器人系统开发中尤为重要。
此外,ROS的设计哲学中还包括了对开源社区的深度依赖。ROS的快速成长和广泛的用户基础得益于其活跃的开源社区。开发者可以从社区中获取帮助,贡献自己的代码,共同推动ROS的发展。
5.2.2 ROS与其他机器人系统比较
ROS自诞生以来,便迅速成为机器人系统开发的主流选择之一,与一些其他流行的机器人系统相比较,ROS有其独特的优势。
首先,与传统的机器人操作系统如VxWorks或者QNX相比,ROS更加强调软件的可重用性、开放性和社区支持。ROS中的大多数软件包都是开源的,社区成员可以自由地使用、修改和重新发布这些代码,这大大加快了软件开发的速度,并降低了成本。
其次,与Microsoft Robotics Studio或者Webots这类仿真环境相比,ROS不仅提供仿真,更重视与真实机器人硬件的结合。ROS的许多算法和工具都是直接针对真实世界中的机器人进行优化的,因此它被广泛应用于实验室和工业生产中的实际机器人项目。
再者,ROS与专有机器人系统相比具有更好的可扩展性。由于ROS的松耦合和模块化特性,它更容易集成新的传感器、驱动器和算法。专有系统往往在功能扩展方面受到限制,且成本较高,这使得ROS成为教育和研究的首选。
但是,ROS也存在一些挑战和局限性。由于其设计之初并未考虑性能优化,ROS可能不适用于需要极高实时性的应用场景。此外,对于初学者来说,ROS的复杂性和学习曲线较为陡峭,缺乏直观的图形用户界面(GUI)也是一大缺陷。
综上所述,与其他机器人系统相比,ROS以其开源、可扩展和模块化的设计理念,在机器人开发领域占据了独特的地位。无论是在学术研究还是在工业生产中,ROS都已经证明了其在实现复杂机器人系统方面的巨大潜力和应用价值。
6. ROS的社区资源与未来发展
随着ROS(Robot Operating System)在机器人领域的广泛运用,它已经拥有一个庞大而活跃的全球社区。这一社区为开发者和爱好者提供了丰富的资源和机会,同时也在推动ROS向前发展。在本章中,我们将深入探讨ROS社区所提供的资源,以及ROS在各领域的应用案例,最后,我们将讨论ROS目前的局限性,并对其未来的发展方向做出展望。
6.1 ROS社区和资源介绍
6.1.1 社区支持和参与方式
ROS社区是一个由全球开发者、研究人员和爱好者组成的庞大网络。他们通过各种渠道相互支持和协作,包括:
- ROS Answers : 这是一个问答论坛,类似于Stack Overflow。在这里,用户可以提出问题、分享解决方案,以及帮助他人解决ROS相关问题。
- ROS Discourse : 是社区的邮件列表和讨论论坛,用于各种主题的讨论和交流。
- ROS Wiki : 包含了大量的文档、教程和最佳实践指南,是学习ROS的宝贵资源。
- ROSCon : 是年度的ROS会议,开发者和研究者可以在此分享经验、发布新的研究成果。
参与社区的方式多样,你可以通过以下几种途径:
- 贡献代码 : 参与ROS包的开发和维护,提交补丁和改进。
- 写文档 : 帮助编写和改进ROS Wiki中的文档。
- 教育贡献 : 提供教学材料、举办研讨会或在线课程。
- 开源项目 : 启动或参与一个开源ROS项目,与社区合作。
6.1.2 开源资源和学习资料
ROS社区提供了大量的开源资源和学习资料,包括但不限于:
- ROS 书籍 : 有《Programming Robots with ROS》、《Learning ROS for Robotics Programming》等。
- 在线教程和课程 : 如edX、Coursera和Udemy等平台上的ROS相关课程。
- 学术论文 : 关于ROS的最新研究和进展,可在学术期刊和会议论文集中找到。
- ROS包和工具 : 社区成员开发的大量ROS包和工具,如导航堆栈、视觉处理工具等。
6.2 ROS应用及限制分析
6.2.1 ROS在不同领域的应用案例
ROS被广泛应用于不同的领域,其灵活性和模块化特点使它能够适应各种复杂的机器人系统,以下是一些典型的应用案例:
- 工业自动化 : ROS用于机器人的路径规划、抓取和放置等任务。
- 医疗护理 : 开发用于协助病患活动或手术辅助的机器人。
- 教育 : 在大学和研究机构的机器人课程中,ROS是教授机器人编程的首选工具。
- 空间探索 : 使用ROS进行地面测试和模拟,帮助制定太空任务计划。
6.2.2 ROS的局限性和未来展望
尽管ROS非常强大,但它也有一些局限性。比如,对于实时性要求高的应用,ROS可能不够理想。此外,ROS的大量包和工具需要用户具备较高的技术背景才能有效利用。
对于未来的展望,ROS社区正在积极开发ROS 2,旨在解决ROS的一些固有缺陷,包括更好的实时性能、更强的安全性以及跨平台的支持。
从长远看,随着人工智能和机器人技术的不断进步,ROS有望成为一个更加完善的机器人操作系统框架,推动机器人技术的边界。
以上内容是根据您提供的文章目录大纲结构,完成了第六章的内容撰写。在实际应用中,您可以根据具体的章节内容要求,进一步深化和扩展这些讨论点。
简介:ROS作为机器人技术的开源软件平台,提供了操作系统级功能,并拥有庞大的全球社区。本文推荐的三本电子书籍《ROS_Robot_Programming_CN》、《ROS入门实例(中文版)》和《机器人操作系统(ROS)浅析》分别从理论、实践到分析各个层面,对ROS进行了全面介绍。从基础架构到复杂交互网络的构建,从工具链开发到调试和测试,以及从实例教学到ROS生态系统分析,为不同层次的学习者提供完整的ROS学习路径。无论初学者还是专业人员,这些书籍都将帮助读者深入理解ROS,并提升机器人开发能力。

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐


 17
17 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)