DeepEP项目介绍与调用指南
DeepEP是DeepSeek推出的开源通信加速库,专为MoE(混合专家)模型优化训练与推理性能。该库通过NVLink和RDMA技术实现高吞吐量节点内外通信,支持FP8低精度计算,并提供低延迟推理内核。核心优势包括:1)优化全到全通信架构;2)支持计算与通信重叠;3)自适应路由与流量隔离管理。性能测试显示,在H800 GPU上,节点内通信带宽达153GB/s(NVLink),节点间延迟最低163微
B站同步视频 -> 点击进入> 企业级落地项目 > 点击进入> AI 企业赋能落地项目> 点击进入>
DeepEP项目介绍与调用指南
一、DeepEP项目介绍
1. DeepEP项目发布详情
DeepSeek开源周第二天,正式发布DeepEP,一个MoE模型训练与推理内部通信加速库。

🚀 开源周第二天:DeepEP
很高兴介绍DeepEP——首个开源EP通信库,用于MoE模型的训练和推理。
✅ 高效且优化的全到全通信
✅ 支持节点内和节点间通信,兼容NVLink和RDMA
✅ 高吞吐量的内核,用于训练和推理前填充
✅ 低延迟内核,用于推理解码
✅ 原生FP8调度支持
✅ 灵活的GPU资源控制,支持计算与通信的重叠
DeepEP是一个为Mixture-of-Experts (MoE) 模型优化的通信库,提供高吞吐量和低延迟的GPU内核,用于MoE调度和合并操作。其主要特点包括:
- 高性能:支持NVLink和RDMA进行节点内外通信,针对非对称域带宽转发优化了内核。
- 低精度操作:包括FP8支持,用于高效计算。
- 低延迟推理:提供使用纯RDMA的低延迟内核,减少推理解码的延迟。
- 通信与计算重叠:引入了一种基于钩子的方式,不占用SM资源。
- 自适应路由与流量隔离:支持自适应路由以实现低延迟内核,并通过虚拟通道进行流量隔离。
性能基准测试显示,尤其是在训练和推理前填充任务中,吞吐量有显著提高。该库要求使用Hopper GPU,Python 3.8+,CUDA 12.3+,PyTorch 2.1+,以及NVLink/RDMA网络。
为了获得最佳性能,用户应进行测试并使用自动调优配置。DeepEP在MIT许可证下发布,NVSHMEM相关代码除外。
2. DeepEP工作原理解析
要理解DeepEP如何工作,可以将其比作一条繁忙的高速公路,其中汽车代表数据,城市象征计算机组件。如果没有精心规划的道路和交通规则,拥堵和延迟是不可避免的。DeepEP就像一套先进的高速公路系统,旨在最大化效率,确保数据流畅且快速地传输,具有多个关键特性。
- 优化的全到全通信
在Mixture of Experts (MoE)模型中,每个专家必须与其他所有专家交换数据。DeepEP使这一过程得以无瓶颈地进行,类似于为每辆车提供专属的高速车道。
- 支持节点内和节点间通信
节点内通信发生在同一计算机芯片内,类似于车辆在城市内行驶。DeepEP利用NVLink,NVIDIA的高速连接技术,加速这一过程。
节点间通信发生在不同计算机或芯片之间,类似于汽车在城市间行驶。DeepEP利用**RDMA(远程直接内存访问)**直接在机器之间传输数据,减少延迟并优化性能。
- 高吞吐量、低延迟GPU内核
GPU驱动AI模型,但其效率取决于如何处理和交换数据。DeepEP集成了专门的GPU内核,最大化处理速度,将等待时间减少到几乎为零。
- 灵活的资源控制
DeepEP允许开发人员动态分配计算任务到不同的GPU,能够无缝适应不同的硬件配置。
通过在各个层面优化数据流,DeepEP确保即使是最复杂和分布式的AI系统也能平稳高效地运行。
二、DeepEP项目部署流程
- DeepEP项目官网:https://github.com/deepseek-ai/DeepEP

1. DeepEP功能详解
DeepEP是一个为Mixture-of-Experts (MoE) 和专家并行(EP)量身定制的通信库。它提供高吞吐量和低延迟的全到全GPU内核,也称为MoE调度和合并操作。该库还支持低精度操作,包括FP8。
为了与DeepSeek-V3论文中提出的组限门控算法对齐,DeepEP提供了一套针对非对称域带宽转发优化的内核,例如将数据从NVLink域转发到RDMA域。这些内核提供高吞吐量,适用于训练和推理前填充任务。此外,它们支持SM(流式多处理器)数量控制。
对于延迟敏感的推理解码,DeepEP包括一套低延迟内核,采用纯RDMA以最小化延迟。该库还引入了一种基于钩子的通信与计算重叠方法,不占用任何SM资源。
注意:该库中的实现可能与DeepSeek-V3论文中的某些部分略有不同。
1.2 性能
- 使用NVLink和RDMA转发的普通内核
我们在H800(最大NVLink带宽约为160 GB/s)上测试了普通内核,每个连接到CX7 InfiniBand 400 Gb/s RDMA网络卡(最大带宽约为50 GB/s)。并且我们遵循DeepSeek-V3/R1的预训练设置(每批次4096个token,7168个隐藏层,top-4组,top-8专家,FP8调度和BF16合并)。
|
类型 |
调度 #EP |
瓶颈带宽 |
合并 #EP |
瓶颈带宽 |
|
节点内 |
8 |
153 GB/s(NVLink) |
8 |
158 GB/s(NVLink) |
|
节点间 |
16 |
43 GB/s(RDMA) |
16 |
43 GB/s(RDMA) |
|
节点间 |
32 |
44 GB/s(RDMA) |
32 |
47 GB/s(RDMA) |
|
节点间 |
64 |
46 GB/s(RDMA) |
64 |
45 GB/s(RDMA) |
- 使用纯RDMA的低延迟内核
我们在H800上测试了低延迟内核,每个连接到CX7 InfiniBand 400 Gb/s RDMA网络卡(最大带宽约为50 GB/s)。并且我们遵循典型的DeepSeek-V3/R1生产设置(每批次128个token,7168个隐藏层,top-8专家,FP8调度和BF16合并)。
|
调度 #EP |
延迟 |
RDMA带宽 |
合并 #EP |
延迟 |
RDMA带宽 |
|
8 |
163 us |
46 GB/s |
8 |
318 us |
46 GB/s |
|
16 |
173 us |
43 GB/s |
16 |
329 us |
44 GB/s |
|
32 |
182 us |
41 GB/s |
32 |
350 us |
41 GB/s |
|
64 |
186 us |
40 GB/s |
64 |
353 us |
41 GB/s |
|
128 |
192 us |
39 GB/s |
128 |
369 us |
39 GB/s |
|
256 |
194 us |
39 GB/s |
256 |
360 us |
40 GB/s |
1.3 普通内核(Normal Kernels)和低延迟内核(Low-latency Kernels)解释
这两张表分别展示了DeepEP在不同类型内核下的性能表现:
- 普通内核(Normal Kernels):
- 这里的“普通内核”指的是使用NVLink和RDMA技术传输数据的常规内核,适用于训练任务和推理前填充任务(例如计算中间结果等)。
- 第一张表中的数据展示了节点内和节点间通信的带宽,证明了通过NVLink和RDMA传输数据时,DeepEP能够提供足够的带宽支持这些计算任务,确保任务能够顺利进行而不出现瓶颈。
- 例如,表格中**节点内(Intranode)的带宽为153 GB/s(NVLink),而节点间(Internode)**的带宽为43-47 GB/s(RDMA)。这说明,在不同硬件配置下,DeepEP能够有效地利用这些技术进行高吞吐量的数据传输。
- 低延迟内核(Low-latency Kernels):
- “低延迟内核”则专门针对推理任务进行优化,尤其是推理解码(inference decoding)。这种任务通常对延迟非常敏感,所以需要通过RDMA技术来最大限度地减少延迟。
- 第二张表展示了不同数量专家(#EP)下的延迟表现,表格中的数据表明,DeepEP在使用纯RDMA的情况下能够实现非常低的延迟。例如,当调度8个专家时,延迟为163微秒;当调度128个专家时,延迟为192微秒。这个低延迟性能对于实时推理非常重要,尤其是在大规模分布式计算中。
可行性证明
这两张表的主要作用是展示基于NVLink和RDMA技术的DeepEP在实际任务中的高性能和低延迟,并证明这项技术的可行性,特别是在大规模分布式训练和推理中的应用。它们帮助我们理解:
- 可扩展性:表格中展示的带宽和延迟随着调度专家数目的增加而变化,证明DeepEP能够在不同规模的任务下高效运行,且随着任务的扩展,性能表现仍然是可接受的。
- 优化效果:通过这些测试数据,DeepEP展示了其优化过的内核能够显著提高数据传输速度并减少延迟,从而能够满足大规模AI模型训练和推理的需求。
1.4 训练任务、推理前填充任务和推理解码概念解释
- 训练任务(Training Task):
- 训练任务
- 指的是在深度学习过程中,用于训练神经网络模型的任务。这是一个非常消耗计算资源的过程,通常包括:
- 前向传播(Forward Propagation):将输入数据通过神经网络传递,得到预测输出。
- 损失计算(Loss Calculation):计算网络预测值和实际标签之间的误差。
- 反向传播(Backward Propagation):通过误差反向传播更新模型的权重,使模型逐渐更好地进行预测。
- 参数更新(Parameter Update):使用优化算法(如梯度下降)更新模型中的参数。
训练任务的目的是让模型通过大量的训练数据学习模式和规律,以便能够对新数据做出准确的预测。
- 推理前填充任务(Inference Prefilling Task):
- 推理前填充任务通常是在进行推理之前,准备模型输入数据的过程。比如,在做大规模的推理时,可能需要提前将一些数据加载到内存或者进行必要的预处理,以确保推理任务的高效执行。
- 这个过程通常涉及将模型需要的输入数据提前准备好,以减少实际推理过程中等待数据加载的时间。**“前填充”**就是提前填充数据,为推理任务做好准备。
- 推理解码(Inference Decoding):
- 推理是指用训练好的模型对新数据进行预测的过程,也就是模型应用于实际场景的阶段。例如,给定一张图片,模型推理出其中的物体类别;或者给定一段文本,模型生成对应的答案。
- 推理解码特指推理过程中,模型根据输入数据(如一段文本)生成输出结果的过程。解码过程通常涉及将模型输出的向量或概率转化为实际的结果,例如将生成的文本序列从模型的内部表示解码成自然语言文本。
- 例如,在自然语言处理任务中,如果模型是生成文本的模型(如GPT类模型),那么“解码”过程就是模型从内部的数值表示(如logits、概率分布等)生成最终的词语或句子。
- 在图像生成模型中,解码可能是指将模型生成的特征向量转化为实际的图像。
2. DeepEP部署流程
2.1 快速开始
** 环境要求**
- Hopper GPU(以后可能支持更多架构或设备)
- Python 3.8及以上版本
- CUDA 12.3及以上版本
- PyTorch 2.1及以上版本
- 用于节点内通信的NVLink
- 用于节点间通信的RDMA网络
- 下载并安装NVSHMEM依赖
DeepEP还依赖于我们修改过的NVSHMEM。请参考我们的NVSHMEM安装指南获取详细的安装说明。
2.2 开发
- 构建并创建SO文件的符号链接
|
Bash |
- 你可以根据自己的平台修改具体的SO文件名
|
Bash |
- 运行测试用例
注意:你可以根据自己的集群设置,修改tests/utils.py中的init_dist函数,并将测试运行在多个节点上。
|
Bash |
2.3 安装
|
Bash |
然后,在你的Python项目中导入deep_ep,就可以开始使用了!
以下是这段内容的翻译:
2.4 网络配置
DeepEP已经通过InfiniBand网络进行了充分测试。不过,理论上它也与**RDMA over Converged Ethernet (RoCE)**兼容。
2.5 流量隔离
InfiniBand通过**虚拟通道(VL)**支持流量隔离。
为了避免不同类型流量之间的干扰,我们建议将不同的工作负载划分到不同的虚拟通道中,具体划分如下:
- 使用普通内核的工作负载
- 使用低延迟内核的工作负载
- 其他工作负载
对于DeepEP,你可以通过设置NVSHMEM_IB_SL环境变量来控制虚拟通道的分配。
2.6 自适应路由
自适应路由是InfiniBand交换机提供的一种高级路由功能,能够均匀地将流量分配到多个路径上。目前,低延迟内核支持自适应路由,而普通内核则不支持(可能很快会加入此功能)。启用自适应路由用于普通节点间内核时,可能会导致死锁或数据损坏问题。
对于低延迟内核,启用自适应路由可以完全消除由于路由冲突导致的网络拥塞,但也会引入额外的延迟。我们建议在以下配置下以获得最佳性能:
- 在网络负载较重的环境中启用自适应路由
- 在网络负载较轻的环境中使用静态路由
2.7 拥塞控制
由于我们在生产环境中未观察到显著的拥塞,因此拥塞控制被禁用。
以下是这段内容的翻译:
3. 在模型训练或推理前填充中的示例使用
普通内核可用于模型训练或推理前填充阶段(不包括反向传播部分),如下所示的示例代码。
|
Python |
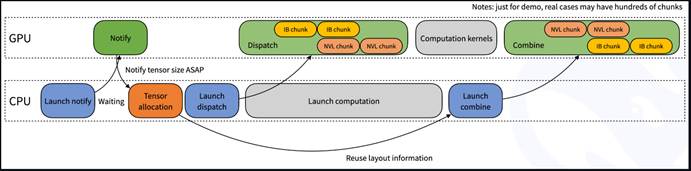
另外,分派函数内部,我们可能不知道当前rank需要接收多少个tokens。因此,会涉及到一个隐式的CPU等待GPU接收计数信号的过程,如下图所示。
4. 在推理解码中的示例使用
低延迟内核可以用于推理解码阶段,如下面的示例代码所示。
|
Python |
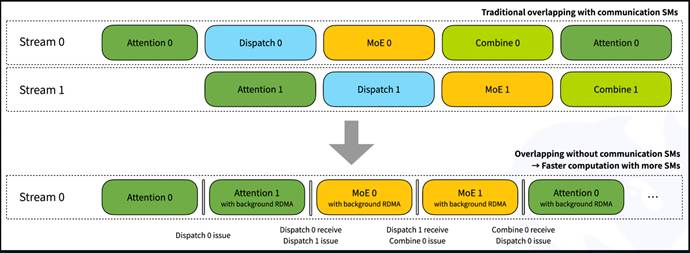
对于双微批重叠,您可以参考以下图示。通过我们的接收钩子接口,RDMA网络流量在后台发生,而不会占用任何GPU SMs用于计算部分。但是请注意,重叠的部分可以进行调整,即注意力/分派/MoE/合并这四个部分的执行时间可能并不完全相同。您可以根据工作负载的需求调整阶段设置。
- 注意事项
为了实现极限性能,我们发现并使用了一条文档外的PTX指令:ld.global.nc.L1::no_allocate.L2::256B。这条指令会导致未定义行为:使用非一致性只读PTX修饰符.nc访问GPU易失性内存。但经过测试,在Hopper架构上使用.L1::no_allocate时,其正确性能够得到保证,且性能会大幅提升。如果您在其他平台上发现内核无法正常工作,可以在setup.py中添加DISABLE_AGGRESSIVE_PTX_INSTRS=1来禁用此指令,或提交问题报告。
为了在您的集群上获得更好的性能,建议运行所有测试并使用最佳的自动调优配置。默认配置是基于DeepSeek的内部集群进行优化的。

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 28
28 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)